Durante molti dei laboratori e dei corsi che conduco, inizio a introdurre il mondo dei robot riflettendo anche sulla loro forma. Evidentemente, in fase di progettazione ed ideazione, è estremamente importante riflettere sulla forma che vogliamo utilizzare per un robot. Infatti, la forma che hanno queste macchine deve essere pensata per fare in modo che questi siano il più efficienti possibile.
 Immaginiamo un robot che si vuole utilizzare per il trasporto di materiale, magari su terreni accidentati. Dovrà essere in grado di muoversi con una discreta agilità, essere in grado di affrontare terreni scivolosi ed impervi, poter trasportare del peso e non rimanere incastrato. Fatte queste considerazioni, è evidente che la forma umanoide non sia la più efficace: con solo due punti di appoggio, un baricentro alto e limitata possibilità di carico potremmo incontrare dei problemi. Altrettanto, una forma ispirata a un serpente sarebbe altrettanto inefficace: potremmo magari guadagnare libertà di movimento, ma perdendo molta capacità di carico.
Immaginiamo un robot che si vuole utilizzare per il trasporto di materiale, magari su terreni accidentati. Dovrà essere in grado di muoversi con una discreta agilità, essere in grado di affrontare terreni scivolosi ed impervi, poter trasportare del peso e non rimanere incastrato. Fatte queste considerazioni, è evidente che la forma umanoide non sia la più efficace: con solo due punti di appoggio, un baricentro alto e limitata possibilità di carico potremmo incontrare dei problemi. Altrettanto, una forma ispirata a un serpente sarebbe altrettanto inefficace: potremmo magari guadagnare libertà di movimento, ma perdendo molta capacità di carico.
 A titolo di esempio di robot che assolvono bene il compito immaginato, possiamo prendere ispirazione dal mondo reale con il “cane” di Boston Dynamics, oppure anche dalla finzione cinematografica con il robot WALL•E. La forma di questi robot non è casuale: si è, infatti, cercato di realizzare macchine che potessero essere il più funzionali possibile, in riferimento al loro scopo.
A titolo di esempio di robot che assolvono bene il compito immaginato, possiamo prendere ispirazione dal mondo reale con il “cane” di Boston Dynamics, oppure anche dalla finzione cinematografica con il robot WALL•E. La forma di questi robot non è casuale: si è, infatti, cercato di realizzare macchine che potessero essere il più funzionali possibile, in riferimento al loro scopo.
Ancora, ritornando ai robot citati qualche riga sopra, sebbene un robot serpentiforme non ci sia utile per il caso esaminato prima, ci può invece essere molto utile per la ricerca nel caso di calamità, potendosi muovere anche in spazi angusti, oppure per l’ispezione di tubi e condotti. Infatti, un robot con quella forma è stato utilizzato per l’ispezione del reattore della centrale di Fukushima dopo il disastro nucleare.
Oltre ad assolvere al meglio un compito, però, se un robot è pensato perché interagisca con degli esseri umani – pensiamo ad esempio ai cobot, ai robot assistenziali e di servizio e ai robot domestici – è anche fondamentale che tale macchina abbia un aspetto “gradevole” per l’essere umano.
In questo senso, è interessante andare ad analizzare il fenomeno chiamato uncanny valley o “valle della perturbazione”, ipotizzato dallo scienziato Masahiro Mori nel 1970. Mori ha studiato il variare della familiarità – inteso come senso di piacevolezza o empatia – che un campione di persone mostravano per diversi robot al variare della loro somiglianza con gli esseri umani. In realtà, tale esperimento è replicabile anche nel caso di oggetti diversi da robot, come manichini o personaggi del cinema animato.
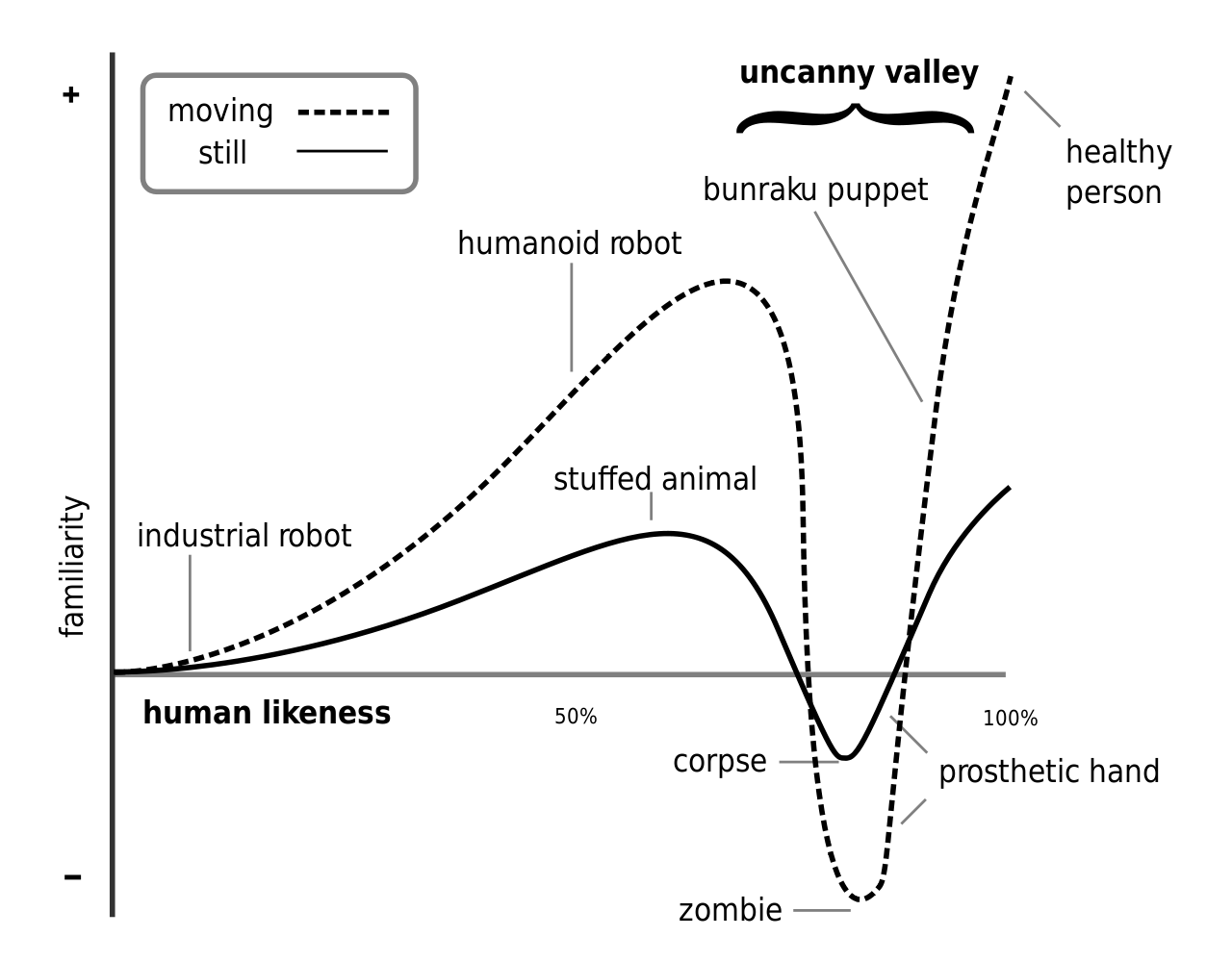 Lo scienziato ha notato che il grado di piacevolezza, partendo da un certo grado di neutralità, tende ad aumentare a mano a mano che i robot aumentano la somiglianza all’umano. Tuttavia, tale ascensione non prosegue fino alla identicità della macchina all’uomo, ma raggiunto un certo punto si ha una brusca deflessione della familiarità – appunto la uncanny valley – in cui i partecipanti alla ricerca mostrano sensazioni di avversione o turbamento. Tale deflessione si ha nel momento in cui la somiglianza è eccessiva, ma non tale da rendere la macchina indistinguibile dall’uomo, tanto da riportare alla mente, ad esempio, la figura dello zombi. La curva riprende a crescere solamente nel momento in cui la somiglianza ritorna a essere tale da giungere alla somiglianza con una persona in salute.
Lo scienziato ha notato che il grado di piacevolezza, partendo da un certo grado di neutralità, tende ad aumentare a mano a mano che i robot aumentano la somiglianza all’umano. Tuttavia, tale ascensione non prosegue fino alla identicità della macchina all’uomo, ma raggiunto un certo punto si ha una brusca deflessione della familiarità – appunto la uncanny valley – in cui i partecipanti alla ricerca mostrano sensazioni di avversione o turbamento. Tale deflessione si ha nel momento in cui la somiglianza è eccessiva, ma non tale da rendere la macchina indistinguibile dall’uomo, tanto da riportare alla mente, ad esempio, la figura dello zombi. La curva riprende a crescere solamente nel momento in cui la somiglianza ritorna a essere tale da giungere alla somiglianza con una persona in salute.
Mori, ancora, scrive “… non ho dubbio che [questa sensazione di inquietudine] sia parte integrante del nostro istinto di autoconservazione. Il senso di inquietudine è probabilmente una forma di istinto che ci protegge da fonti di pericolo prossimali …”.
Sebbene altre ricerche siano ancora in corso, e la teoria sia contestata da taluni scienziati, è evidente che il grado di familiarità che proviamo verso le macchine – anche se non fosse di carattere universale, ma dipendente dall’individualità e dal contesto socioculturale – è legato anche alla loro forma.
Come possiamo utilizzare queste idee applicandole nella didattica? Possiamo, innanzitutto, provare a riflettere sulla forma dei robot, che siano reali o anche in molti casi di finzione cinematografica. Un dato robot perché ha la forma con cui lo vediamo? Possiamo, poi, provare a tenere in considerazione queste idee ogni qual volta si progetta un robot, e possiamo provare a immaginare – anche solo concettualmente – un robot che vorremmo progettare. Poi, perché non provare a ripetere l’esperimento? Mostrando ai propri studenti – maggiore è il loro numero migliore sarà il risultato – immagini di diversi robot gli si può chiedere che esprimano, in una scala numerata, il loro grado di familiarità con il robot. In questo modo, si otterranno delle serie di dati che sarà possibile andare ad analizzare, con interessanti risvolti matematici e statistici.
Bibliografia
Mori, M. (1970). Bukimi no tani [the uncanny valley]. Energy, 7(4), 33–35.
MacDorman, K., F., Ishiguro, H. (2006). The uncanny advantage of using androids in social and cognitive science research. Interaction Studies. 7 (3): 297-337. doi:10.1075/is.7.3.03mac. S2CID 17092251.
https://en.wikipedia.org/wiki/Uncanny_valley
https://www.roboticsbusinessreview.com/energy-mining/back_to_fukushima_with_a_snake_robot/
Attribuzione delle immagini
1 Immagine di Tekniska museet/Nisse Cronestrand – Rilasciata con licenza CC-BY-SA 4.0 Internazionale
2 Ritaglio di un’Immagine di KieranH75 – Rilasciata con licenza CC-BY-SA 4.0 Internazionale
3 Immagine di Smurrayinchester, rilasciata con licenza CC-BY-SA 3.0 Unported